Descrizione del prodotto
Generalità
- Alimentazione elettrica: CC 24-65V
- Corrente continua 10A, picco di corrente 20A
- Quadrato-fluttuare il controllo
- Modo di controllo: modo dell'amplificatore, modo di velocità
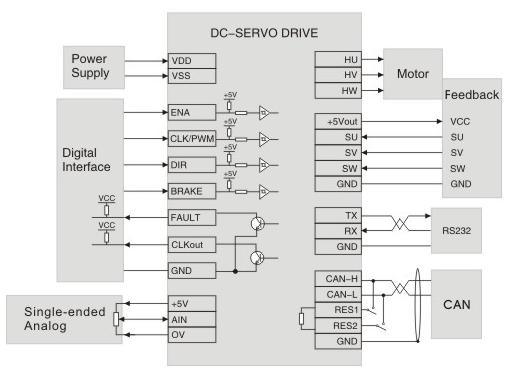
- Interfacce di comando: RS232, PUÒ, CLK/DIR, PWM, analogo (CC 0-5V)
- Risposte: sensore del corridoio
- Protezione: sopra la corrente, sopra il caricamento, sopra tensione, sotto tensione
- Progettato per il servomotore di BLDC
| Punti | Tabelle | Valore | Unità |
| Alimentazione elettrica | VDD | 24-65 | V CC |
| Corrente continua | I continuo | 10 | A |
| Picco di corrente | I picco | 20 | A |
| Frequenza di PWM | f PWM | 25 | chilociclo |
| Output di forza motrice del Corridoio | +5V fuori | 5 | V CC |
| Icc | 100 | mA | |
| Input di Digitahi | CLK, in 1 | A basso livello: 0-0.3V Ad alto livello: 3-5 | V |
| Uscita dell'errore | OC | Massimo tir suare a 30V a 5mA, | |
| Comando di PWM | Frequenza | 100-500 | Hertz |
| Frequenza di massimo CLK | f massimo | 200 | chilociclo |
| Comunicazioni | RS232 | 9600 (19200) | kilobits |
| POTERE | 500 (1000, 250, 125, 100, 50, 20) | kilobits | |
| Sotto tensione | Vu | 18 | V CC |
| Sopra tensione | Vo | 71 | V CC |
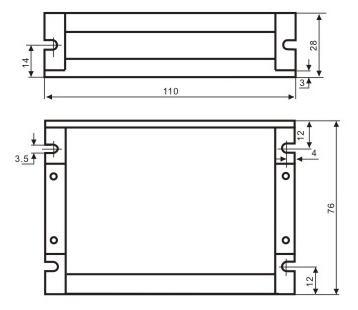
Meccanico
Schema caratteristico